HSST開発技術者の講演録

HSSTイメージ図
1978年2月21日、日本航空の技師・中村信二氏は、東京大学航空宇宙研究所が主催した航空学シンポジウムで、HSST開発の概要と今後の見通しについて講演をおこないました。その講演草稿をまとめた冊子を入手したため、その全文を公開しておきます。専門家を対象としているため一部に難解な箇所もありますが、ほぼ原文のまま公開しておきます。
まえがき
HSSTとは、High Speed Surface Transportの略で、日本航空が開発を進めている磁気浮上、リニア・モーター推進による高速地表輸送機の名称である。
試作1号機HSST-01は、本年(1978年)2月14日、川崎市の東扇島実験場で、目標実用速度時速300kmを越える時速307.8kmの最高速度を記録した。また、人員9名を乗せることのできる2号機HSST-02が最近完成し、試験飛行を開始した。以下にこれまでの開発の概要と今後の見通しについて述べる。
1.開発の経緯
日本航空が空を飛ぶものでない、このようなものに関心を持つに到った理由は言うまでもなく空港アクセス問題である。特に成田が開港した際に、このままでは地上の輸送に大きな支障を生じ、高速輸送機関としての航空輸送の価値が半減するであろうことは、既に以前から指摘されている通りである。
日航の総合開発委員会では数年前からこの問題を取り上げ、公害の少ない高速の地上輸送機関で都心と成田および羽田を結ぶことの可能性について調査検討を進めていた。日航の技術陣が本格的にこの検討に参加したのは、1974年の初頭からである。
従来の車輪とレールに依存する鉄道は、速度に限界があるだけでなく、騒音、振動などで環境を損なうので、これを打破するために新しい非接触の浮上推進方式が各国で開発されつつあった。当時我国では国鉄を中心として超電導コイルによる誘導反発浮上方式が研究されており、フランスではAerotrain社が、空気浮上方式、ジェットエンジン推進によって時速400km以上で実験飛行を行なっていたし、西ドイツではKrauss-Maffei社およびMBB社が通常の電磁石による吸引浮上方式の実験飛行を行なっていた。
日航技術陣では、これら各種方式を検討した結果、西ドイツの吸引式磁気浮上方式が低公害、省エネルギーの点で優れており、かつ最も早く実用に供しうる可能性が高いとの結論に達した。
当初日航としては、目的に適した方式を外部から導入する考えであったが、西ドイツの開発状況を見ると、磁気浮上方式そのものは優れており、先駆者としての功績を認めなければならないが、実用化の構想に問題点が多く、特にマグネット以外のリニア・モーターや集電方式、機体構造などについての設計上の不備に気付き、このまま彼等の開発を待つことは得策とは思えなかった。
そこで、我々の考えに基いた実用機の構想を画き、この実現に一歩を踏み出すことが必要であると考えるに到った。
勿論、日本航空はメーカーではないからその活動範囲にも制約があり、地上輸送機関についての技術的知識や経験に乏しいことを充分わきまえた上で、敢えてこのような開発に手を染めたのは、上に述べた理由の他に次のような背景があった。
後で述べるように、浮上式輸送機は、軽量構造でかつ空力的に洗練される必要があり、特に高速においてはAero dynamic machineとしての特性が性能を左右するので、構造やシステムに航空機の設計概念を応用するのに打って付けの乗物である。航空機は、多方面にわたる最新技術の集約されたものであり、これらをこなさなければ充分な整備を行なうことができない。
日航には若手の優れた技術者が多くいて、HSSTの開発は彼等の能力をフルに活用し、かつ技術に磨きをかける機会を与えることになる。
2.各方式の比較と吸引式磁気浮上選定の理由
どのような方式でも、それぞれのメリットとデメリットがあり、適用範囲も異なるであろうから、ここで技術的細部について議論することは差し控えたい。
しかし、特に空気浮上(エアクッション)方式と超電導方式について概略の得失を比較し、我々が吸引式磁気浮上を選んだ理由について明らかにしておきたい。
先ず空気浮上方式であるが、既にAerotrainが1970年頃からオルレアンの近郊で人を乗せて試験を行なっており、実用化に最も先行しているように見える。
しかしその推進は、当初はプロペラ(ダクト・ファン)であり、その後ジェットエンジン(JT-8D)によるもので、騒音などの点でそのまま実用化するわけには行かない。
エアクッション方式で魅力的なのは、構造が簡単であり機体の荷重が平面的に分布支持されるので、軽量構造とし得ること、平面のプラットフォームがあれば方向転換や横移動が自由に行えることなどである。
しかしながら、この方式の難点の一つは、浮上に要するパワーが大きいことであり、1トンの揚力に対して10〜30kW必要とされている。
これは吸引式磁気浮上に較べて1桁大きい。高速時にはラム圧を利用することにより、必要パワーは減少するように思われるが、浮上用に取り入れた空気の運動量変化が空気抵抗となり、総体的には余り変化はない。トラックとクッションの隙間を小さくする程浮上パワーは小さくなるが、このためには平面状のトラック面の仕上げをよく保たねばならず、さもないとクッションのスカートが摩耗して実用的でない。
トラックが平面状であるということは、降雨や積雪に対して対策を必要とする他、トラックの保守維持に問題がありそうである。
次に超電導方式であるが、我国の国鉄をはじめとして世界の主要な国で、大分以前から開発が進められ、研究論文の大部分はこの方式に関するものであり、磁気浮上の代名詞となっている観がある。この方式の原理は、磁束密度の高いコイルを導体に沿って走らせるとき、電磁誘導によって導体に流れる渦電流との間に反発力が生ずることを利用するものであり、ある程度の速度ではじめて充分な浮揚力を得ることができる。
この現象はちょうど翼の浮力に似ているのでMagnetic flightなどと呼ばれている。このため、浮揚速度に達するまでは車輪を必要とするが、高速では10〜30cmの極めて高い浮上ができるので我国のように地盤の悪いところに適していると考えられている。
また機上の強力な超電導コイルを利用して、地上にリニア・シンクロナス・モーターの一次側を布設すれば、推進のための電力を機上に送る必要がないので、高速で問題となる集電の困難さが避けられる。
このような利点があるにもかかわらず、この方式は実用化の過程で克服すべき多くの問題を抱えているように思われる。たとえば、超電導状態に保つ限りコイルの損失はないが、ヘリウムの冷却、液化にかなり大きなパワーを必要とするし、また高価なヘリウムの散逸を防ぐことに技術的困難が予想される。その他強力な磁場が人体に及ぼす影響とか、高速における動安定など今後解明せねばならぬ多くの点があると思われる。
吸引式磁気浮上のアイデアは、西ドイツのHermann Kemperが1935年に特許をとったが(※実際は1934年か?)、その原理は鉄レールに対して機上に配した電磁石を下から対向させ、ギャップ・センサーを用いて電磁石とレールの隙間を一定に保つように電流を制御するものである。
当時は今日のように電子技術が発達していなかったことも一つの理由で、陽の目を見ずに特許は時間切れとなった。
1960年代後半、西ドイツのMBB社とKrauss-Maffei社が相前後してこの方式の開発に着手し、現在は西ドイツ政府の指導下にTransrapid-EMS社として合同開発を行なっている。
1975年、MBB社の製作したKOMET機はロケット推進で時速401kmを記録し、1977年11月にKrauss-Maffei社の製作したTransrapid-04は人を乗せてリニア・モーター推進により時速253kmを記録している。
この方式の利点の一つは、浮上パワーが他の方式に比較して小さい点にある。すなわち1トンの揚力を得るのに1〜3kW程度しか要しない。またレールとの間隔が極めてタイトに保持できるので、リニア・インダクション・モーターと組合わせれば、モーターのエアギャップの維持が容易である。
浮上パワーは、レールと磁石の間隙の自乗に比例して小さくなるが、間隙はレールの精度とマグネットの制御性との兼ね合いで決めねばならない。
一方、間隙を大きくすると浮上パワーが増えるだけでなくマグネットの重量が増大する。
この方式の欠点と考えられていたものの一つは、レールとマグネットの間隙が10mm程度と小さなことで、このためレールの精度を余程良くしないと高速走行には適さないのではないかということである。
しかし後述するように、この問題は実用上何ら支障のないことが判明した。この方式の魅力はなんと言っても大部分が既に解明され実用化されている技術の応用であり、それ故に安価でかつ実用化が極めて容易であることである。
3.HSST-01の開発および実験の経過
HSST-01の目的は、吸引式磁気浮上による高速飛行にかける技術上の問題点を探ることと、リニア・インダクション・モーター(以下LIMと略す)の高速時の特性、特に端効果に関するデータを採ることにあった。このためLIMは将来実用機において用いられるサイズのものが試験しうるように機体の大ききを考慮した。
日本航空の整備工場で組立てられた機体は、1975年12月、横浜の杉田にある日本飛行機の敷地を借用して建設された実験場に搬入された。LIMによる初飛行を行なったのは12月22日の夕刻で、陽が落ちてからであった。
杉田の実験場は、トラックの長さが約200mである関係から最高速度は時速35km程度であったが、人を2名乗せることが出来た。予想通り極めて抵抗が少なく1トンの重さのものが片手で楽に動かすことが出来た。低速では氷の上を滑るように極めてなめらかであるが、速度が増すに従ってレールの歪にマグネットが追随するため、その反応が伝わり乗心地が次第に悪くなる。これは2次サスペンションをつけていないため当然のことであるが、逆に追随性のよいことの証明ともいえる。
杉田での試験飛行は、翌1976年1月28日に新聞社、テレビに公開され、その後一般の人々にも何回か公開された。しかし高速実験のためには、もっと長いトラックがどうしても必要であったので、あちこち候補地を探した結果、川崎の埋立地東扇島に1300mのトラックを建設することになった。
川崎の東扇島は約2年前に埋立てられたもので、水を含んだヘドロ地帯があり、地盤の不等沈下が予想され、また塩分を含んだ汐風で鉄などはすぐに錆びてしまうという条件の悪い場所であったが、このような場所で実験することは、かえって実用化の足がかりになるという考え方もできた。
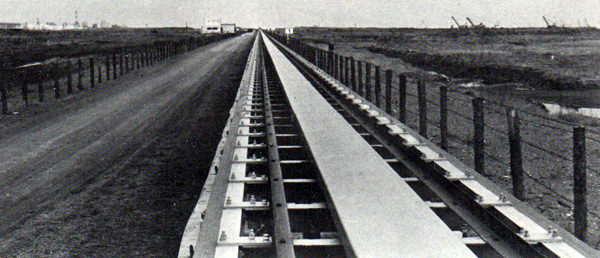
東扇島テストコース全景
トラックが出来上るまでの間、機体は高速向けの改造を行なった。すなわち空力的不安定モーメントを打消すための尾部の安定板、1G以上の減速が可能な空気圧ブレーキ、無人化のための装備などを取り付けた。
待望のトラックが完成し機体が東扇島へ搬入されたのは9月になってからであった。1977年4月に最高時速150kmに達したので、それまでの関係者を中心として外部の人々に対する公開実験を行なった。その後各部に改良を重ねながら実験を進め、昨年末LIMのみの加速で時速219.3kmを記録した。それまでに日本、フランス、カナダの運輸大臣をはじめとして内外の多くの人々に対して実験が公開された。
この実験で技術的に最も困難な点の一つは、限られた長さのトラックで高速を出すために、いかに急加速、急停止を行なうかにある。時速300kmの速度から1Gで減速するとしても約400mは滑走する。最後の100mを緊急停止用予備として取ると800m地点からブレーキをかけなければならない。従って時速220km以上の高速データをとるためにロケットによる加速補助を行なった。本年2月1日、ロケットを併用して時速294.4kmを記録したが、時速290kmを超えた約1秒間のデータを採ることが出来た。この間もLIMは期待通りの推力を出していることが確認された。
4.HSST-01の概要
4.1 機体
機体は航空機と同じアルミニウム合金構造で、縦断面は流線形になっている。横断面はトラックを左右から抱きかかえる形となっていてその両端にマグネットが付いている。重心がほぼ中央にあるので、僅かなピッチングまたはヨーイングによって空力的な不安定モーメントが生ずる。
そこで風洞実験を行ない、これをちょうど中立化するだけの大きさの尾翼を取り付けた。これは、機体が小さいので重量に対して表面積が大きく、従って高速時の空気力の影響を受けやすいことを考慮したためであって、実用機の場合このような尾翼は不要である。
4.2 浮上および案内
浮上および横方向の案内を行なうのは、左右各4ケ合計8ケの電磁石で、これらは逆U字形のレールに対向している。浮上の制御のため機体の4隅に誘導式ギャップ・センサーがあってマグネットとレールの間隙を測定し、間隙が開き過ぎるとコイルの電流を増し、狭くなり過ぎると電流を減らせるような制御を行なうことによって、本来不安定な系を安定に維持する。
HSST-01では通常10mmの間隙を維持するように調整してある。実際の回路はもっと複雑で、ギャップ信号のほかに加速度、磁束密度などの信号を加味することによってレールに対して追随性の良い制御を行なっている。
左右の案内は、2ケのマグネットを1組としてレールに対して僅かずつ外側と内側にずらして配置し、ぺア・マグネットの合計揚力が変わらないように保ちつつ各マグネットの電流を変えることによって横方向の力を発生させる。このために機体の左側に案内用のギャップ・センサーが前後に取付いている。
この案内方式はKrauss-Maffei社の方法であって、MBB社では浮上用と別の案内用マグネットを用い、これを L字型または逆T字型レールに対向させる方式を採っている。
浮上用の電源は、機上に搭載したバッテリーから得ているが、一度充電すれば20分ほど浮上していることができる。浮上を止めたときは、機体はスキッドによってレールの上に乗るようになっていて、飛行中浮力を失なったときは、スキッドによりレール上を滑走する。
4.3 推進
推進力は、機体の中央下部に取付けたLIMによって得られ、最大推力は340kgであるので0.3G程度の加速度が得られる。
LIMは通常の誘導モーターの固定子に相当する一次側を直線にしたものと考えればよく、これに3相交流を供給すれば、回転磁束でなく前後に走る移動磁束が生ずる。回転子に相当するものは地上に敷設したリアクション・プレートで、これは導体としてのアルミニウム板と磁束通路としての鉄板を張り合わせたものである。
移動磁束によってアルミニウム板に誘導電流が流れ、これと磁束との相互作用で推進力が発生する。
この型式のLIMは所謂SLIM(Single sided LIM)と称されるもので、高速実験用ではDLIM(Double sided LIM)が用いられた例が多い。これはリアクション・プレートを中央にはさんで両側に固定子を配置したもので、LIMの吸引力の影響を避けることができるが、機上側にも地上側にも機械的構造に難点が多い。
LIMの電源としては、電圧と周波数が可変のVVVFを用いており、200kVA程度の電力を必要とするので、トラックに設置した3相の給電線から集電子を介してLIMに供給している。浮上状態ではLIMはリアクション・プレートから約12mmのエア・ギャップを保っているので、集電子が地上と接触している唯一の部分である。
VVVFの発電には、同期発電機を自動車のエンジンで駆動する方法を用いている。これは主として経費上の理由によるものであったが、結果として東扇島のように商用電源を得られない場所では打って付けであった。
4.4 ブレーキ、アレスターおよびブースター・ロケット
LIMは高速時にはブレーキとして用いることができるが、最高1Gの減速度を得るために空気圧式の機械ブレーキを左右各1ケ取付けてある。トラックの全長にわたってアングル材を設置し、これをブレーキ・シューが両側から挾む型式である。
空気圧を用いたのは圧縮空気ボトルを動力源として用いることができるからである。通常のディスク・ブレーキと違って、絶えず新しいブレーキ・レール面が進入してきてブレーキ・シューを冷却するので、高いエネルギーを吸収すろのに好都合である。
万一ブレーキが効かない場合を想定して、トラックの最後の100mの部分にアレスターを設けてある。これは、ブレーキ・アングルに多数のクランプを配したものて、ここに突入した機体は次々とクランプを押しながら滑走し、最高5Gまでの減速度で急停止するようになっている。
この場合に勿論機体の損傷は避けられないので通常の走行では1200m以内で停止するように計画している。
機体の後尾に加速ブースター用の70mm固体燃料ロケットが計12発装着できる。ロケットの推力は350kgで持続時間1.5秒である。LIMによって速度が時速150km程度に達したときに0.75秒の間隔をおいて2発ずつ点火するので、最も推力の高い時は1.4Gの加速度となる。
4.5 トラック
マグネットの相手となるレールは、JISのU型鋼を用いている。このレールは0.75m毎に枕木で支えられ、枕木は10.5mの長さの縦ビームにボルトで固定されている。縦ビームは1000m地点までは鉄筋コンクリートで、最後の300mは鋼である。
地盤の不等沈下を考慮して、縦ビームはスクリュージャッキによって高さの調節ができるようにしてあったが、案の定、施工後約1年で最大0.5m前後の沈下が生じた。
集電レールは銅の平角線を用い、溶接によって全長にわたり連続している。歪を除くためと、横ゆれの波動速度を機体速度より早くするために、約3トンの張力がかけられるようになっている。
5.技術的成果と今後の見通し
これまでのHSSTの開発状況を振り返って見ると、おおよそ所期の技術的目標を達成し、しかも諸外国に比較してかなり急速に開発できたと言うことができよう。これまでの成果を要約すると共に、今後の実用化に関する展望を行ないたい。
5.1 マグネットの制御とレールの精度
高速飛行をしながらマグネットがレールの歪に追随して所定の間隙を維持する為には、マグネットの追随可能な周波数を高めなければならない。HSST-01では、この周波数は約5Hzである。このことは時速300km(秒速83.3m)において17m程度以内のレールの歪には追随出来ないことを意味する。従って波長17m以下の歪はギャップ巾より小さくし、更にオーバーシュートを考慮して数ミリ以内に留める必要がある。
HSST-01の飛行データから、トラックの精度をこの範囲に維持する限り、マグネットやスキッドがレールに接触する可能性はほとんどないことが実証されている。
HSST-01では、マグネットは機体に固着されているが、もしマグネットがバネとダンパーによる2次サスペンションを介してそれそれ独立に機体に結合されているならば、マグネットの追随性は格段に向上し、10Hz以上でも追随可能となる。これはレールの必要精度を更に低めることができることを意味し、同じレール精度なら制御性を犠牲にして電源電圧などを低くすることが可能となる。
またレールの歪に追随するマグネットの振動は直接機体に伝わらないので、乗り心地が良くなるなど多くの利点がある。当初からHSSTの実用型はこのような構想に基いて設計が進められているが、MBBでもこの点に着目しKOMET-2として原型機を改造して実験を行なうよう計画している。
5.2 安全性
高速において機体やマグネットがレールと接触した場合の安全性については、従来この方式の問題点の一つとして考えられていた。上に述べたように10mmのギャップであっても、通常の制御機能が働いている限りレールに接触することはあり得ないが、浮上力を失なったり、制御が乱れてレールと接触しても何ら危険を伴なうことなく滑走し得ることも実験で確認された。制御された状態で仮に接触した場合は勿論何等の問題はなく、乗心地を害するだけである。
しかし留意すべき点は、マグネットの電力増巾にサイリスタ・チョッパーを用いた場合、転流失敗を起こした時にマグネットが一時的にレールに吸着し、このため比較的大きなブレーキ力が作用することである。これに対しては電力増巾の方式と共にレールの磁束が過大にならぬよう適当に飽和するような厚さのレールを選ばねばならない。
更に考慮すべき点は、レールの接合が外れた場合の危険性で、これを防ぐためには、地盤の変形などによってレールの変形が生じても外れないようにすると共に、多少の段差は乗り上げるようなマグネットとスキッドの先端の形を考えるなど設計上留意しなければならない。
5.3 騒音と振動
この方式は鉄道や自動車のように地表と接触していないから、それに起因する振動や騒音は皆無である。
HSST-01の音は、低速ではマグネットのチョッパー音と、集電子の摺動音であり、高速では空力騒音が主体となるが、いずれも従来の乗物と比較して格段にレベルが低い。空力騒音は速度の3乗ないし6乗に比例して増加すると言われているが、これを減らすには機体の流線化と表面の平滑化をはかることが大切である。
5.4 抵抗とエネルギー消費
巡航状態では必要な動力は抵抗に比例する。従来の鉄道では車輪のコロガリ抵抗が車体の空気抵抗に匹敵する大きさなので、空気抵抗を減らしても効果に限度がある。HSSTでコロガリ抵抗に相当するものは、マグネットがレールに誘起する渦電流による抵抗で、この抵抗はマグネットの極性をそろえて連続的に配置することにより極めて小さなものとし得る。
数台の機体を連結して列車を編成した場合、理想的な状態ではマグネットの揚抗比を1000以上にすることが出来る。このため当初心配されていたようにレールに積層板を用いる必要はない。この結果、機体の抵抗は空気抵抗が主体となり、これを減らせばそれだけ全体の抗力が小さくなる。
特に列車を編成した場合は、空気抵抗のうち摩擦抵抗が支配的となり更にこれはレイノルズ数の影響で長い列車程乗客当りの抵抗は減ってくる。このようなわけで、表面の突起や凹凸を減らすと共に表面仕上げを良くすることが極めて有効となってくる。
加速に要する動力は機体の重量に比例する。東京一成田間の運航では比較的短距離なので、加速エネルギーは巡航エネルギーの約3分の1程度の大きさとなる。加速エネルギーを小さくするには機体の重量を軽減することと、LIMのダイナミック・ブレーキを利用して動力回生を行なうことが望ましい。
時速300kmの速度では、浮上エネルギーは推進エネルギーの10分の1程度であって問題にならないが、低速飛行では無視できない。従って省エネルギーの観点から見れば、この方式は特に低速用の乗物としては適当でないが、中低速向けにマグネットを設計するなら、時速50km程度の速度で車輪方式に充分太刀打できるものを作ることが可能と思われる。
5.5 リニア・モーターと動力源
HSST-01に用いたリニア・モーターはSLIMであって、従来高速向きではないとされ、特にリアクション・プレートとの間に働く吸引力が問題視されていた。LIMは、吸引力の他に滑り速度(同期速度と機体速度との差)が大きくなるに従って反発力も発生する。
これは超電導方式の場合の揚力に相当するもので、効率の良い滑り速度において吸引力と反発力が釣合ってゼロとなるようにLIMを設計することができる。このようなLIMは所謂「カッパー・マシン」であって比較的高い周波数で駆動しなければならない。
このようなLIMを用いて滑り速度を適正な範囲に保つよう制御するならば、吸引力の影響は小さいことが実験で確かめられた。
将来の機体において、機上でVVVFを作る装置を搭載するならば、いかに軽量でコンパクトに作るか、また電源にどのような方式を用いるかなどは今後に残された課題である。
南米やシベリア大陸のように広大な土地を走る場合、機上でガスタービン発電を行なうことは極めて魅力的な方式であるが、都市近郊には不向きであろう。
5.6 その他
従来の鉄道では、集電が高速走行のネックの一つになっている。
HSST-01では、これを考慮してバランス型の集電器を用いたが、これが成功して時速300km前後の速度でも一度も離線現象を経験していない。
しかしながら、実用路線においては、接合部や分岐点での移行など今後に残された課題がある。
トラックは土木工学の領域に属し、特に我々の未経験の分野である。しかし、トラックや地上設備の初期投資額に占める割合は甚だ大きく、機体のそれは、これに比べて小さい。概略的なトラックの建設費は、支えるべき機体の重量に比例すると見ることができるから、機体を軽く作ることはこの点からも重要である。
分岐部分の構造は、従来の鉄道のような単純なものではなくなるので、これも今後の設計上の課題となる。
まとめ
HSSTは都心と空港を結ぶ手段として開発に着手されたが、技術的な見地からすれば、単に空港アクセスとしての手段としてだけでなく、より近距離の地点を結ぶ手段として、また都市内あるいは近郊用の交通機関として多くのメリットを有しており、近い将来に従来の鉄道の一部にとって代るであろうことは疑いない。西ドイツでは、これまでSiemensを主体とする超電導方式と、Krauss-MaffeiとMBBを主体とする吸引磁気浮上方式の開発が行なわれていたが、最近の情報によれば、西ドイツ政府はこれら両者を比較検討した結果、今後の開発努力を吸引磁気浮上方式に集約することに決定した。
終わりにのぞみ、この機会を利用してHSSTの開発に当り援助と激励を与えて下さった多くの方々、特にトラックの建設に寄与して下さった方々、また利用させていただいた技術論文や文献の発表者に対し感謝の意を表させていただきたい。なお、我々は開発に追われて詳細な技術的結果をとりまとめる暇がなかったが、そのうち機会を見て発表したいと念じている。
●リニアモーターカー開発史
●HSST開発史
広告
